

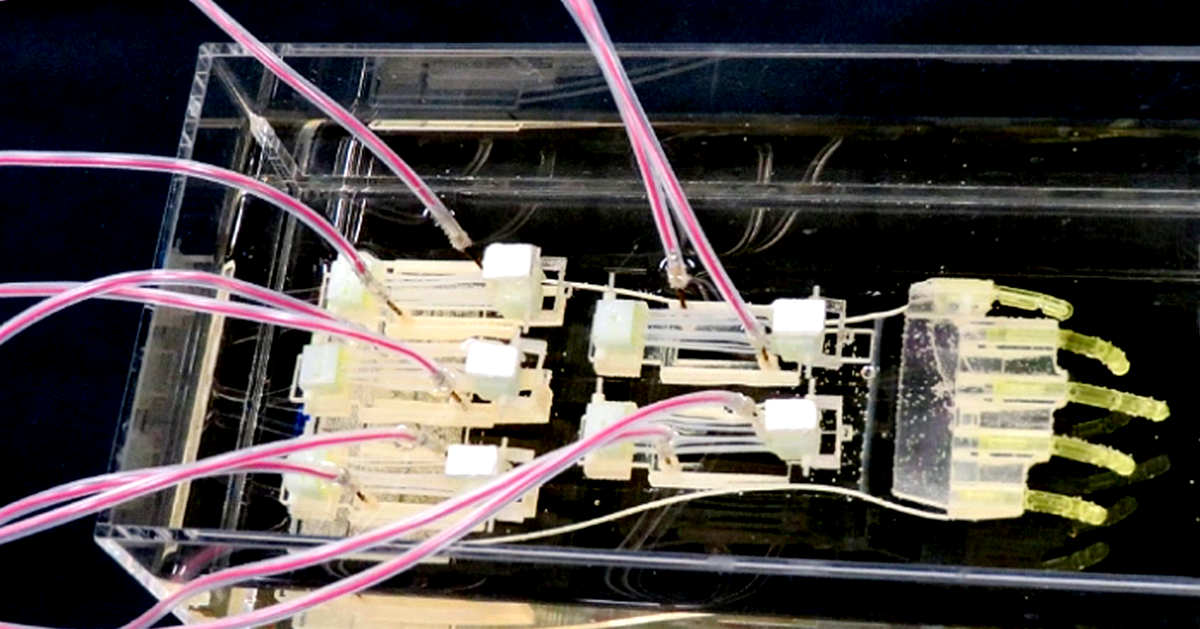
La plupart des robots à quatre pattes sont entraînés à retrouver leur équilibre s'ils butent sur un obstacle. Afin de développer un robot nettoyeur, Joanne Truong, doctorante d'origine vietnamienne à l'École d'informatique interactive du Georgia Institute of Technology (GIT), et ses deux collègues Naoki Yokoyama et Simar Kareer entraînent leur robot à enjamber les objets encombrants qu'il pourrait rencontrer à la maison, comme l'a récemment rapporté Tech Xplore.

(De gauche à droite) Naoki Yokoyama, Joanne Truong et Simar Kareer travaillant avec le robot à quatre pattes
Selon l'équipe de recherche, les robots à quatre pattes équipés de contrôleurs de mouvement « aveugles » ont tendance à réagir davantage pour éviter de tomber lorsqu'ils marchent sur un objet.
Parallèlement, l'équipe de recherche a appliqué une nouvelle approche, fournissant des images en direct permettant au robot de franchir les obstacles, en combinant la stratégie de navigation avec la stratégie de locomotion par images. Cette approche a permis au robot de franchir les obstacles dans un environnement simulé encombré, avec un taux de réussite atteignant 72,6 %.
Le robot est capable d'apprendre de manière autonome et n'imite aucun schéma comportemental préexistant. Les chercheurs affirment que le modèle est évolutif et peut être appliqué immédiatement sans ajustements particuliers. Les règles indiquent au robot d'éviter les objets lorsqu'il se déplace et d'utiliser ses jambes pour enjamber les objets, notamment pour les lever à la hauteur appropriée.
Un « chien robot » surmonte les routes longues et cahoteuses sans tomber
Selon l'équipe, les robots quadrupèdes conventionnels ne peuvent voir le monde réel qu'à travers une caméra frontale et ne peuvent pas voir les objets proches de leurs pieds. L'équipe a intégré la mémoire et la perception spatiale au réseau pour apprendre au robot précisément quand et où franchir les obstacles. Si l'objet était trop haut, le robot pouvait le contourner. « Nous avons constaté que cette méthode naviguait très bien, et même si le robot se trompait de direction, il savait qu'il pouvait reculer et revenir à sa position initiale », a déclaré Truong. L'équipe a également appris au robot quels objets il devait enjamber, comme les jouets, et quels objets il devait contourner, comme les tables et les chaises.
Les découvertes de l'équipe pourraient également aider les robots à naviguer dans des environnements extérieurs réels, en choisissant des chemins en fonction des souhaits de leurs propriétaires pour éviter les terrains boueux ou rocheux.
Cette recherche a remporté le premier prix lors d'un atelier sur la robotique organisé lors de la Robotics Learning Conference 2022 en Nouvelle-Zélande. Elle sera présentée à la Conférence internationale IEEE sur la robotique et l'automatisation, qui se tiendra à Londres, au Royaume-Uni, du 29 mai au 2 juin.
Lien source

![[Photo] Le secrétaire général To Lam assiste au 80e anniversaire de la diplomatie vietnamienne](https://vstatic.vietnam.vn/vietnam/resource/IMAGE/2025/8/25/3dc715efdbf74937b6fe8072bac5cb30)


































































































Comment (0)